深度学习与图像处理、目标识别等概念经常同时出现,它们都是人工智能技术的重要部分,但是这些概念之间是什么关系,具体如何实现的,内部原理是什么,又应用到哪里,在刚开始接触的时候我们是不了解的,本文作为个人的学习记录,先来介绍一下这些概念。
一、深度学习
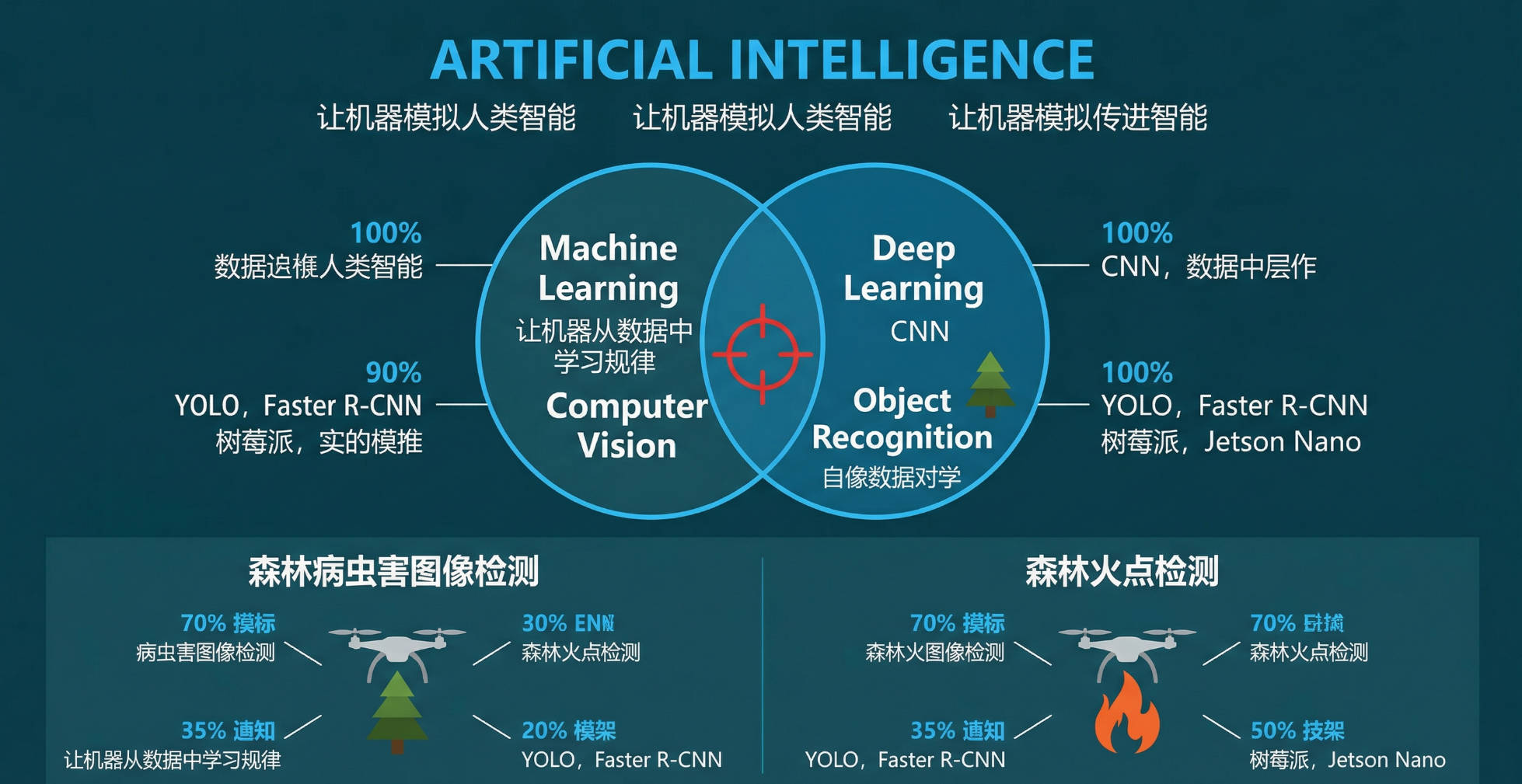
深度学习(Deep Learning)、机器学习(Machine Learning)、人工智能(Artificial Intelligence)这三个概念经常出现在一起,从层级关系上可以认为,深度学习是机器学习的一个子集,而机器学习又是人工智能的一个分支。
我们先各自介绍一下这三个概念的内容,以便于了解它们在整个技术框架中的位置。
🌐 1. 人工智能(Artificial Intelligence, AI)
目标是让机器模拟人类的智能行为。
它是一个最宽泛的领域,包含多个子领域:
| 分支 | 简要说明 | 典型应用 |
|---|---|---|
| 🔹机器学习(Machine Learning) | 让机器从数据中学习规律,是当前AI的核心驱动力 | 图像识别、预测分析 |
| 🔹 知识表示与推理 | 使用逻辑、规则或本体描述世界并进行推断 | 专家系统、医疗诊断 |
| 🔹 自然语言处理(NLP) | 让机器理解、生成人类语言 | 聊天机器人、翻译系统 |
| 🔹 计算机视觉(Computer Vision) | 让机器“看懂”图像和视频 | 目标检测、人脸识别 |
| 🔹 机器人学(Robotics) | 结合感知、决策与控制实现自主行为 | 巡逻机器人、自动驾驶 |
| 🔹 搜索与规划 | 在复杂空间中寻找最优路径或策略 | 游戏AI(如AlphaGo)、路径规划 |
📌 注意:虽然计算机视觉和NLP现在大量依赖机器学习,但它们本身属于AI的独立分支
⚙️ 2. 机器学习(Machine Learning)
机器学习是指通过训练数据构建模型,使系统具备泛化能力(对新样本做出正确预测)
核心思想是让计算机通过数据“学习”规律,而不是依赖明确的编程指令。它包含多种算法,如支持向量机(SVM)、随机森林、K近邻等。
主要分支包括:
| 类型 | 特点 | 常见算法 |
|---|---|---|
| 🔹 深度学习(Deep Learning) | 使用多层神经网络自动提取特征 | CNN、RNN、Transformer |
| 🔹 监督学习(Supervised Learning) | 利用带标签的数据训练模型 | SVM、随机森林、线性回归 |
| 🔹 无监督学习(Unsupervised Learning) | 处理无标签数据,发现隐藏结构 | K-means聚类、PCA降维 |
| 🔹 强化学习(Reinforcement Learning) | 智能体通过试错与环境交互学习最优策略 | Q-learning、DQN(可用于无人机自主飞行控制) |
| 🔹 半监督/自监督学习 | 结合少量标签和大量无标签数据 | 自编码器、对比学习(适合遥感图像场景) |
| 🔹 迁移学习(Transfer Learning) | 将在一个任务上学到的知识迁移到新任务 | 在小样本航拍图像上微调预训练模型(非常适合你的巡检项目) |
🧠 举例:如在做森林病虫害图像检测时,如果标注数据少,就可以用 迁移学习 + 深度学习 的方式,在ImageNet上预训练的ResNet基础上微调。
🧠 3. 深度学习(Deep Learning)
是机器学习的一个子集,以深层神经网络为核心工具
特指使用深层神经网络(尤其是深度卷积神经网络 CNN)进行学习的方法。相比传统机器学习,深度学习能自动从原始数据中提取复杂的特征,特别适合处理高维数据,如图像、语音和文本。
主要网络结构与方向:
| 类型 | 适用任务 | 典型模型 | 是否适用于你项目? |
|---|---|---|---|
| 卷积神经网络(CNN) | 图像分类、目标检测、语义分割 | YOLO、Faster R-CNN、U-Net | ✅ 非常适合!可用于火情/病害识别 |
| 循环神经网络(RNN/LSTM) | 序列建模(时间序列、语音、文本) | LSTM、GRU | ⭕ 可用于传感器时序数据分析(如温湿度变化趋势) |
| Transformer | 图像、文本等长距离依赖建模 | ViT、DETR、BERT | ✅ DETR可用于目标检测;未来可考虑轻量化部署 |
| 生成对抗网络(GAN) | 图像生成、增强、修复 | CycleGAN、StyleGAN | ❌ 当前不急需,但可用于数据增强(合成病害图像) |
| 图神经网络(GNN) | 处理图结构数据 | GCN、GAT | ❌ 暂时不相关 |
| 神经辐射场(NeRF) | 三维重建、新视角合成 | Instant NGP | ❌ 当前不适用 |
🔧 工业应用中通常需要在边缘设备(如树莓派、Jetson Nano 或 STM32MP1)上运行模型,因此:
- 推荐选择 轻量级深度学习模型(如 YOLOv5s、YOLO-Nano)
- 使用 TensorRT 或 ONNX Runtime 加速推理
- 考虑 模型量化、剪枝 技术降低计算开销
二、目标识别
目标识别,属于人工智能技术中计算机视觉的一个重要部分。
计算机视觉本身也是一个大的研究领域,其研究目的是让计算机能够“看懂”图像或视频,理解其中的内容。
它包含许多具体任务,例如:
- 图像分类(识别图中是什么)
- 目标识别(检测物体位置并分类)
- 语义分割(给每个像素打标签)
- 光流估计、三维重建、姿态估计等
🔹 所以:目标识别是计算机视觉中的一个核心任务。
如在无人机巡检的应用中:
- 检测森林中的火点
- 识别病虫害影响区域
- 发现非法入侵者或动物
三、深度学习与目标识别的关系
深度学习是目标识别的一种具体方法,或者说深度学习可以应用于目标识别。
在深度学习兴起之前,已经发展出一系列基于传统图像处理和机器学习的技术来实现目标识别。这些方法虽然在准确率和鲁棒性上通常不如现代深度学习模型,但在某些特定场景下仍然具有价值,尤其是在计算资源受限、实时性要求高或数据量小的情况下,这些传统方法一般分为手工设计特征提取和使用分类器进行检测与定位两个阶段,具体应用如:HOG + SVM 实现行人检测。
那么,深度学习具体是如何应用在目标检测(识别)中的?
我们先来了解一下目标识别的过程。
目标识别的核心任务,就是在一张图像中找出所有感兴趣的目标,并回答两个问题:
- 是什么?(类别 —— 比如是“火点”还是“飞机”)
- 在哪里?(位置 —— 用一个矩形框表示)
✅ 深度学习就是让神经网络自动学会从图像中找出这些“物体 + 位置”。
深度学习模型像一个“超级学徒”,通过看成千上万张带标签的图片(比如标注了“这里是火灾”的图),自己总结出哪些视觉特征代表“火”或“病树”。然后,当它看到新图像时,就能判断是否有类似目标,并框出来。
这个过程主要靠一种特殊的神经网络:卷积神经网络(CNN),特别是为检测任务设计的模型结构。
主流深度学习目标检测方法包括两种,分别依靠两种检测器:两阶段检测器和一阶段检测器,常用的 YOLO 就属于一阶段检测器。这里的"阶段”指的是:目标检测过程中是否明确划分为“生成候选区域”和“分类定位”这两个阶段。
方法1:两阶段检测器(如 Faster R-CNN)
先找可能有东西的地方 → 再判断是什么
- 第一步:生成候选框(Region Proposal)
网络先扫描整张图,找出一些“看起来像有物体”的区域(可能是1000个)。 - 第二步:分类 + 精修位置
对每个候选框,判断它是“火”、“树”还是“背景”,同时微调框的位置。
✅ 优点:准确率高
❌ 缺点:速度慢,适合对精度要求高的场景
方法2:一阶段检测器(如 YOLO、SSD)
一步到位:边扫图边预测
把图像分成一个个小格子(像棋盘),每个格子负责预测:
- 这个区域内有没有目标?
- 是什么类别?
- 边界框怎么画?
🚀 YOLO 意思是:“You Only Look Once” —— 只看一次就完成检测
✅ 优点:速度快,实时性强(每秒几十帧)
❌ 缺点:对小目标略弱(但新版已改善)
这两种检测器都依赖于卷积神经网络 (CNN) 对图像的特征进行提取,同时一阶段检测器中 CNN 还参与预测类别与位置,而二阶段检测器中 CNN 只负责提特征,不直接做检测。具体的原理需要进一步学习。
可以这样认为,卷积神经网络(CNN)是目标检测器的“视觉中枢”: 它先把原始图像转换成富含语义的特征图,然后无论是两阶段还是一阶段检测器,都会基于这些特征去判断“有什么”和“在哪里”。
在 YOLO 这样的先进模型中,CNN 甚至能端到端地完成整个检测任务 —— 从“看见”到“识别”。
YOLO 系列只是应用最广泛,效果相对优秀的算法之一,在不同应用中会使用不同的算法。
四、注意目标识别与图像处理这两个概念的区分
- 图像处理(Image Processing) 是一个更广泛的领域,指的是对图像进行各种操作,比如去噪、增强、边缘检测、滤波、几何变换等。这些操作可以是传统的数学方法(如傅里叶变换、形态学处理),也可以结合智能算法。
- 目标识别(Object Detection) 是计算机视觉中的一个具体任务,目的是在图像中找出特定物体的位置(用边界框标注)并识别其类别(如人、车、飞机)。它是图像处理的高级应用之一。
🔹 图像处理是基础手段,目标识别是高层任务。
在现代智能图像分析系统中,这四个概念通常这样协同工作:
- 图像处理 提供预处理手段(如灰度化、归一化、去噪)或后处理手段(如非极大值抑制 NMS);
- 机器学习 / 深度学习 提供模型框架,用于从大量图像数据中学习如何区分不同物体;
- 深度学习(特别是 CNN、YOLO、Faster R-CNN 等网络)已成为实现目标识别的主流方法;
- 因此,在实际应用中(例如一个无人机航拍巡检项目),会涉及:
- 使用图像处理技术对航拍图像进行预处理;
- 利用基于深度学习的模型(训练好的目标检测网络)来识别森林中的病虫害区域、火灾烟雾或特定目标;
- 这整个过程属于机器学习的应用范畴。
评论区