首页
分类
电子/嵌入式
DIY
航模
路由/NAS
建站
笔迹
书架
归档
友链
留言
关于
静水流深
静水流深,沧笙踏歌
累计撰写
57
篇文章
累计创建
0
个标签
累计收到
50
条评论
栏目
首页
分类
电子/嵌入式
DIY
航模
路由/NAS
建站
笔迹
书架
归档
友链
留言
关于
目 录
CONTENT
航模- 静水流深
以下是
航模
相关的文章
2026-04-24
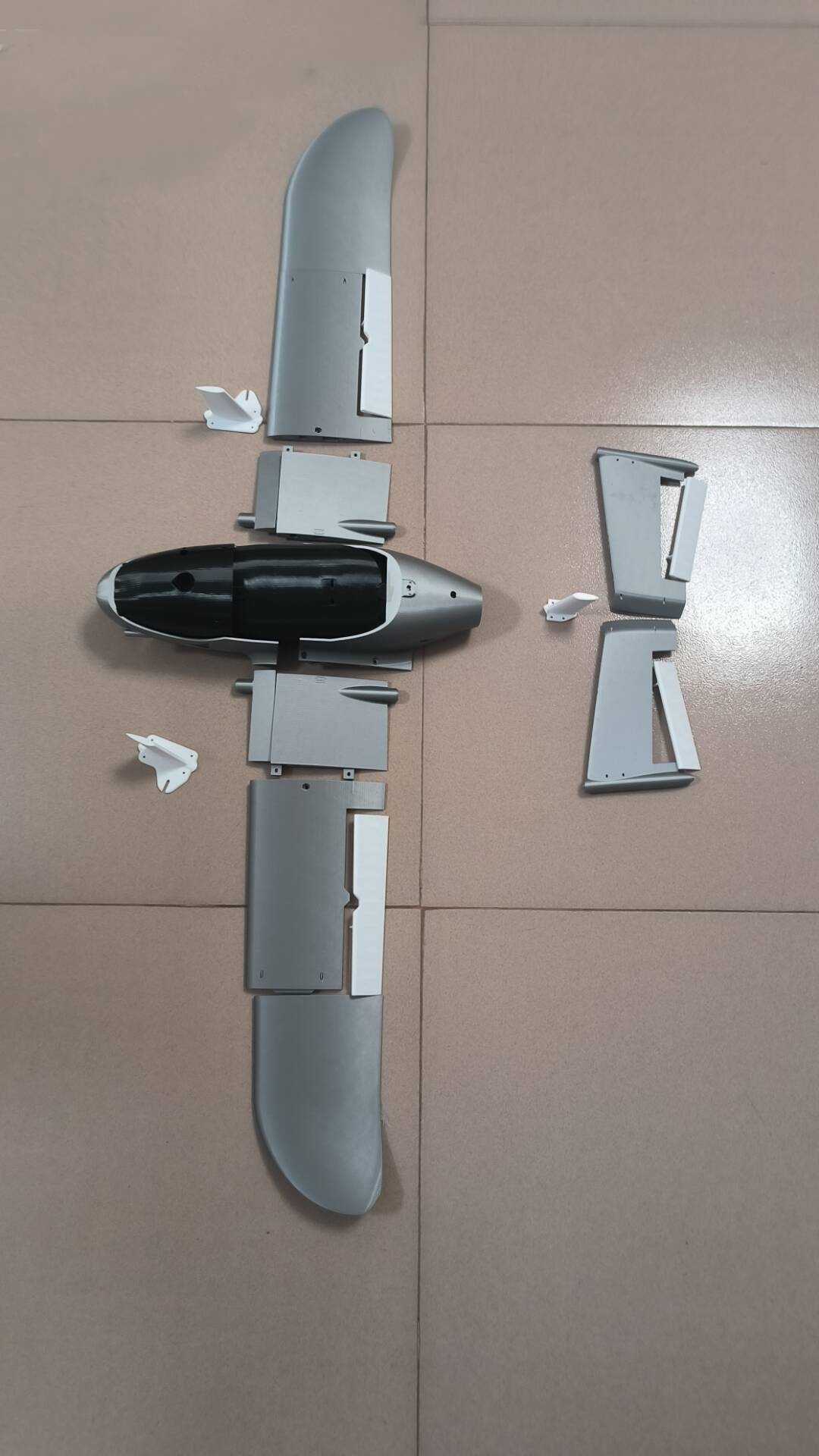
关于3D打印航模一些想法
前段时间打印了一架 AdeleX+10 4+1 垂起,第一次玩 3D 打印的飞机,总体体验不错,但是这架飞机本身有一些设计不合理的地方,装机过程费了一番工夫。组装过程有一些想法,记录一下供以后参考。 关于 AdeleX-10 这架飞机的外型设计我是非常喜欢的,下置两轴云台,1 米翼展,快拆主翼,收纳
2026-04-24
157
5
1
航模
2026-03-09
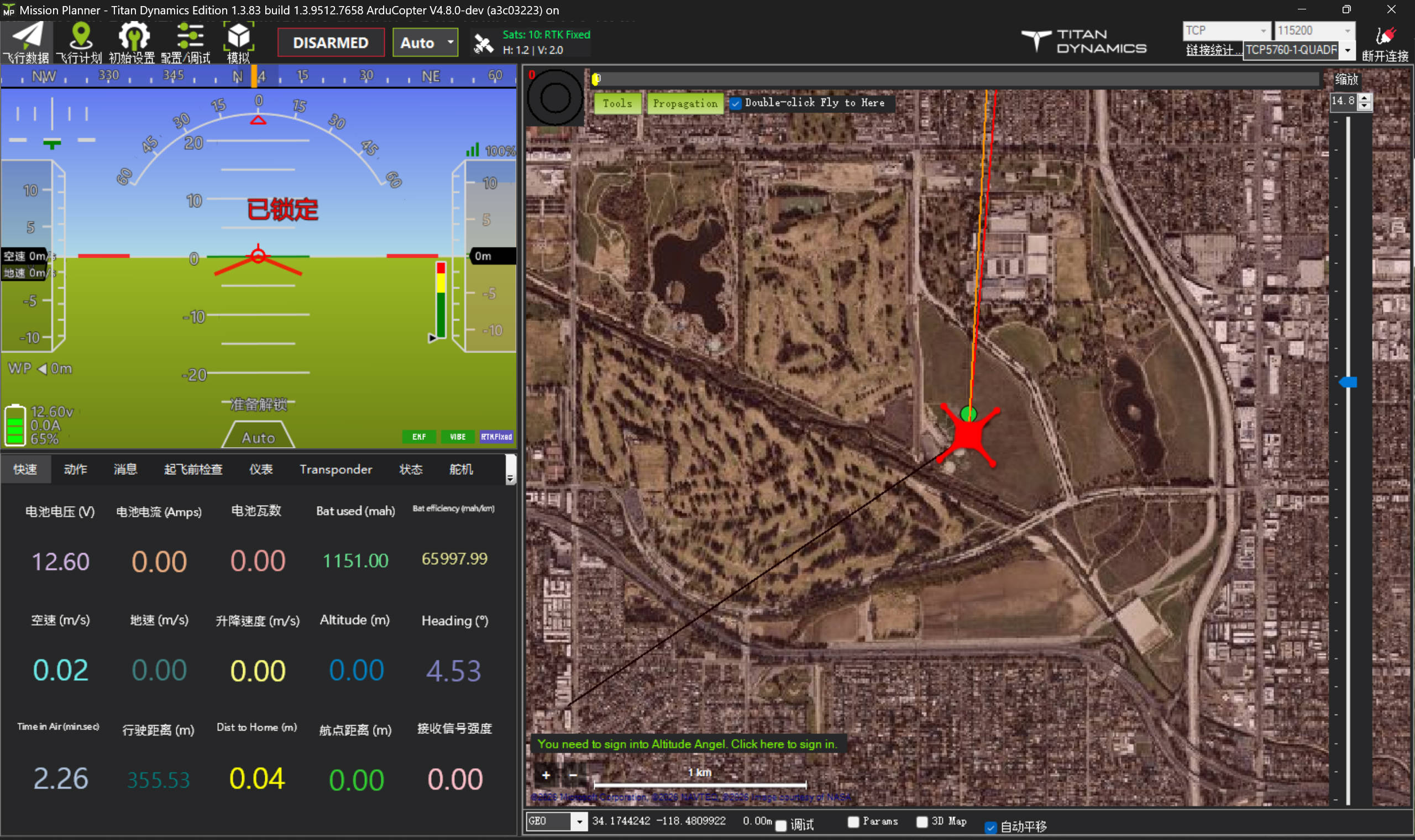
Mission Planner地面站模拟飞行和MAVLINK消息UDP转发
一、模拟飞行 受制于天气条件等,我们并不是任何时候都有外场实飞的条件,同时考虑到对新功能、新航线的验证可能存在一定风险,所以在实飞前进行地面站模拟飞行是有必要的。 因为写了一个接收飞控 MAVLINK 消息的小工具,但是不实飞又无法测试软件接收消息的效果,就想到在地面站模拟飞行并转发 MAVLINK
2026-03-09
131
1
0
航模
2026-02-04
Ardupilot设置MSP协议OSD
天空端使用 RunCam WifiLink 2,飞控适用 Ardupilot 4.6.3 固件,天空端在使用 OpenIPC 固件和 RubyFPV 固件时本设置都适用。 以串口 UART8-Serial8 为例 1. 设置串口参数 设置串口协议为 MSP DisplayPort SERIAL8_P
2026-02-04
103
0
0
航模
2026-01-28
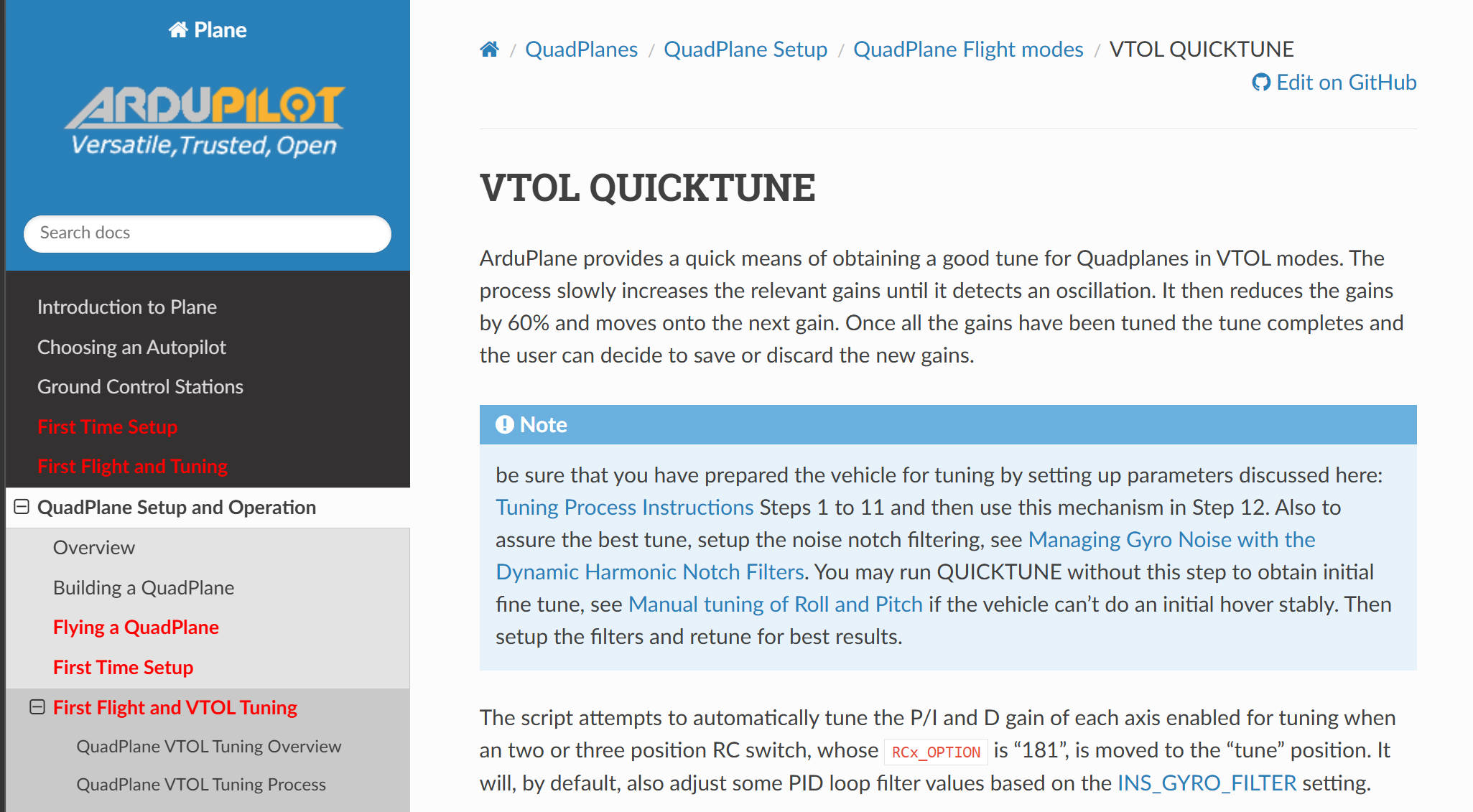
ArduPilot VTOL QuickTune 快速自动调参记录
ArduPilot 固件的垂起模式自动调参有两种类型,分别是QUICKTUNE 和QAUTOTUNE,现在 QAUTOTUNE 已经不再推荐使用,且大多数固件中也未编译,此处只介绍 QUICKTUNE。 在 4.6 之前的 Ardupilot 固件中,要使用QuickTune 需要将VTOL-qui
2026-01-28
151
1
0
航模
2025-05-19
INAV航点飞行
地面站规划航点,加载到飞控存储芯片 (加载到飞控的话掉电将会消失) 起飞前油门最低,右摇杆右上加载航点 起飞后绕家盘旋,激活航点任务开关,开始航点飞行 航点结束后自动执行返航任务 返航到家开始绕家飞行 如果在航点任务执行过程中取消任务,再次开始任务时回从当前位置飞向第一个航点,然后执行后续航点。 [
2025-05-19
281
0
0
航模
2025-05-05
INAV固定翼之AUTO Tune 和 AUTO Level Trim
AUTO Tune自动调参 这个功能调整的主要是PID参数,或者说是所谓的“感度”,让飞机姿态对摇杆的响应更加及时和准确。 AUTO Tune调整步骤: 正常起飞 开启Angle自稳模式,开启AUTO Tune。(也可以把这两个设为同一通道开启) 在空中多次打满俯仰,偏航和横滚 关闭AUTO Tun
2025-05-05
555
0
0
航模
2025-03-29
U-Center配置GPS
U-Center的中文教程,非常详细 项目首页 - U-center用户指南中文版分享:U-center用户指南中文版 - GitCode 要准备一个USB转TTL模块连接GPS与电脑 常要配置的就是数据回传刷新率和波特率 每修改完一个参数之后要点击左下角“Send”,将配置信息发送到GPS,但是此
2025-03-29
467
0
1
航模
2025-02-25
Betaflight调参指北(四)——其它调整
关于FeedForward前馈 简称FF,运算对象是摇杆的输入杆量(Setpoint),与PID(运算对象是角速度)实际上没有直接关系。前馈是一种对摇杆指令的增益,数值越大越跟手,这种增益在摇杆值变化剧烈时(曲线斜率大)效果显著,摇杆缓慢变化时则效果不明显。在一定程度上能弥补P值过低而导致的滞后性,
2025-02-25
204
0
0
航模
2025-02-25
Betaflight调参指北(三)——PID
前言 PID的调整是为了让飞手对飞机有更好的控制力,那么一套好的PID参数应该是怎么样的?我认为应该从电机发热,过冲程度,抖动,洗桨,姿态响应时间等这些方面来判断,总体来说就是一个“手感”问题,同时这也是一个非常主观的问题,每个人习惯的、认为“好飞”的感觉都是不一样的。 刚开始学习调参的时候可以以阶
2025-02-25
533
0
0
航模
2025-02-25
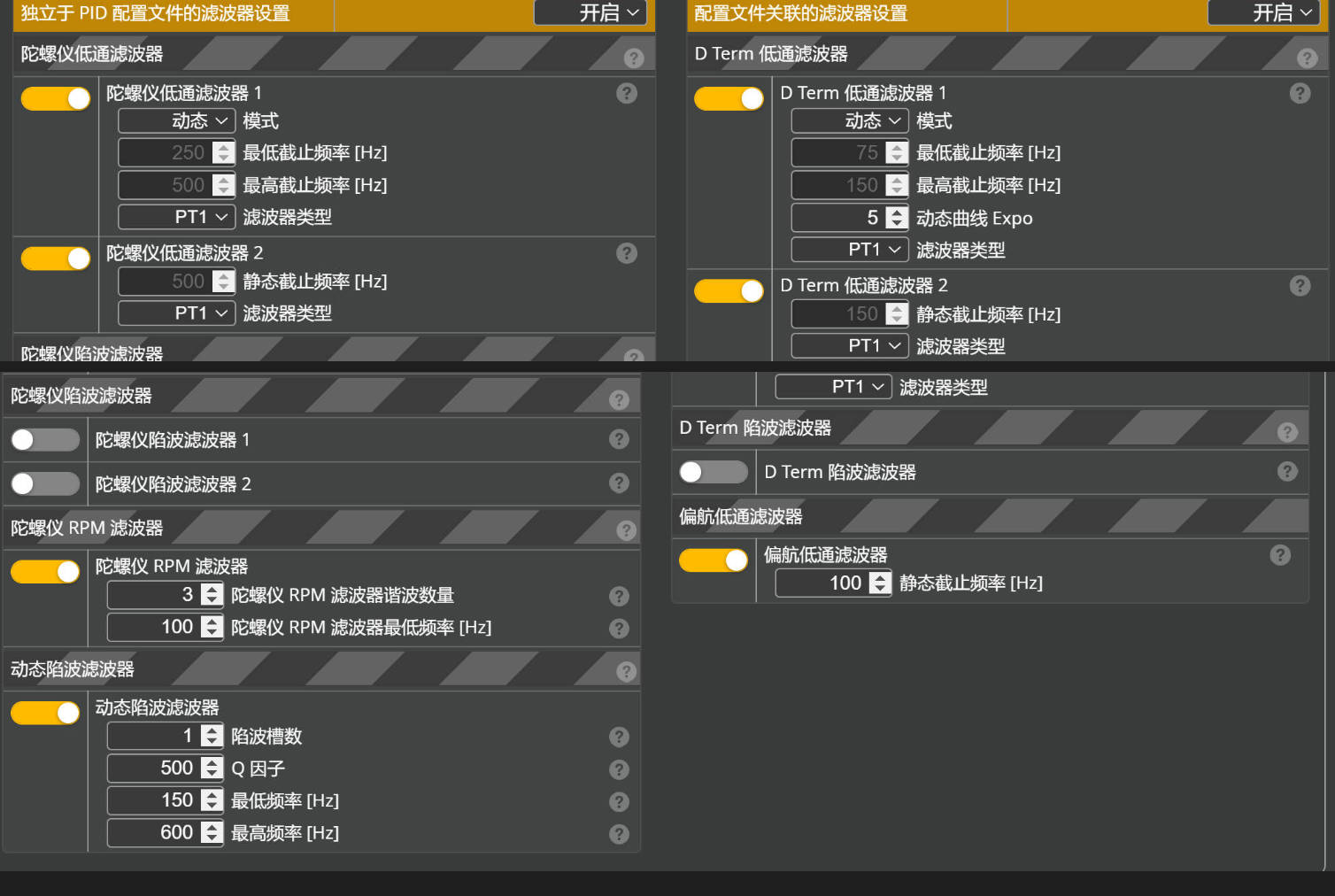
Betaflight调参指北(二)——滤波
前言 滤波是对有效信号的提取,对无效信号的过滤,IMU的信号采集是非常敏感的,各种飞行过程中的震动都会被IMU采集,而飞行器产生震动的原因很多,包括桨叶震动,机架共振,天线摇晃等,这些信号都会传递给IMU并进入PID运算,最后输出给电机,但是因为电流变化是需要时间的,电机无法及时响应频率过高的信号,
2025-02-25
288
0
1
航模
1
2